


ubbi
-
Posts
961 -
Joined
-
Last visited
-
Days Won
2
Content Type
Profiles
Forums
Downloads
Posts posted by ubbi
-
-
vor 1 Stunde schrieb piloto loco:
zum einen wäre interessant wie es zur Zusammenarbeit mit Kamsim kam und wie ihr euch aufgeteilt habt?
Die Zusammenarbeit hat sich einfach geschickt ergeben. Er macht die Grafik, ich alles andere.
vor 1 Stunde schrieb piloto loco:in Plane Maker die Wirkung des linken Pedals (Heckrotor) als Gegendrehung zum Hauptrotor
verstärken kann.
Einfach den maximalen Anstellwinkel der Heckrotorblätter für den linken Pedalauschlag vergrößern.
vor 1 Stunde schrieb piloto loco:Mit steigender Geschwindigkeit und Erhöhung des Lastgewichts wird das linke Pedal wirkungslos. Das soll auch so sein, aber weniger ausgeprägt.
Je mehr Last du hebst, um so mehr Leistung benötigt der Hauptrotor. Also erzeugt der Motor mehr Drehmoment und der Heckrotor muss entsprechend mehr leisten. Du beschreibst hier das klassische „out of pedal” problem. Es gibt mehrere Hubschraubertypen (z.B. die Bell 206 JetRanger) bei denen es in bestimmten Beladungssituationen mit geringem Luftdruck (heiß und/oder hoch) auch in der Realität vorkommen kann, dass der Heli in bestimmten Schwebeflugsituationen trotz voll getretenen Pedal nicht gehalten werden kann! In so einer Situation hilft nur die Flucht nach vorn (oder zur Seite) um dem Heckrotor mit zusätzlichem Wind zu helfen, oder die Flucht nach unten (weniger Pitch, weniger Drehmoment, weniger Pedal nötig).
Ich kenne die MH-60 nicht und weiß daher nicht, ob und wann in der Realität ein voll durchgetretenes Pedal nicht in der Lage ist, eine Drehung des Helis zu stoppen/verhindern.
Im schnellen Vorwärtsflug sollte eigentlich das Pedal grundsätzlich kaum/wenig zu spüren sein, da der Heckrotor gegen den „Wetterfahneneffekt“ kaum ankommt. Der „Gegenwind“ beim Vorwärtsflug schiebt den Heckausleger inkl. Heckrotor ja mit großer Kraft unaufhaltsam nach hinten.
Bislang kling also alles völlig plausibel was du schreibst. Wenn der Rotor verglichen mit dem realen Flugverhalten zu schwach erscheint, ist entweder der Hecjrotor falsch konfiguriert oder grundsätzlich liegt der Hase wo anders begraben. Es gibt unzählige Dinge, die dieses Verhalten beeinflussen. Du könntest z.B. ein falsches Flügelprofil für den Hauptrotor gewählt haben (airfoils). Wenn dadurch die Hauptrotorblätter im Verhältnis zum Auftrieb zu viel Luftwiderstand erzeugen, benötigt der Heli auch zu viel Motirleistung/Drehmoment/Heckrotor.
Aber auch der Reibungswiederstand des Getriebes, das Heckrotorprofil, der Anstellwinkel aller Rotorblätter (Haupt- wie Heckrotor), die Verwindung der Blätter (anderer Anstellwinkel an der Wurzel als an der Spitze), etc….
Aus der Ferne kann ich dir da also überhaupt nicht helfen…
-
Klar kannst du dich bei mir melden. Schreib mir einfach ne PM und dann sehen wir weiter…
-
 1
1
-
-
-
-
-
-
Weiter gehts... so langsam erwacht der Pilot zum Leben und ich beginne alle besonderen Funktionen über das Tablet im Cockpit für euch erreichbar zu machen

-
 1
1
-
1
-
-
On 11.6.2021 at 22:01, airway pirat sagte:
[...]Wenn jetzt noch ein Pilot am Steuer sitzen würde, könnte das als realer Flug durchgehen. [...]

-
1
-
-
-
-
-
-
Tatsächlich haben mir bislang alle Piloten gesagt, dass sie den Rechenschieber in der Lama einfach nicht benutzen. Heutzutage tippst du Höhe und Temperatur einfach in eine Website oder App und hast sofort die Dichtehöhe (googeln reicht). Das war aber 1969 als die Lama raus kam sicher noch anders und die Piloten waren froh über den Ring, bevor sie mit Zettel und Stift drauflos rechnen mussten...
-
1
-
-
Titel: Die Lama und der Pitch Indicator 2/2
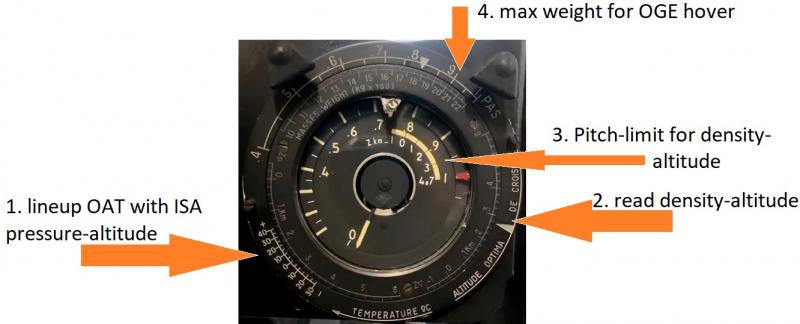
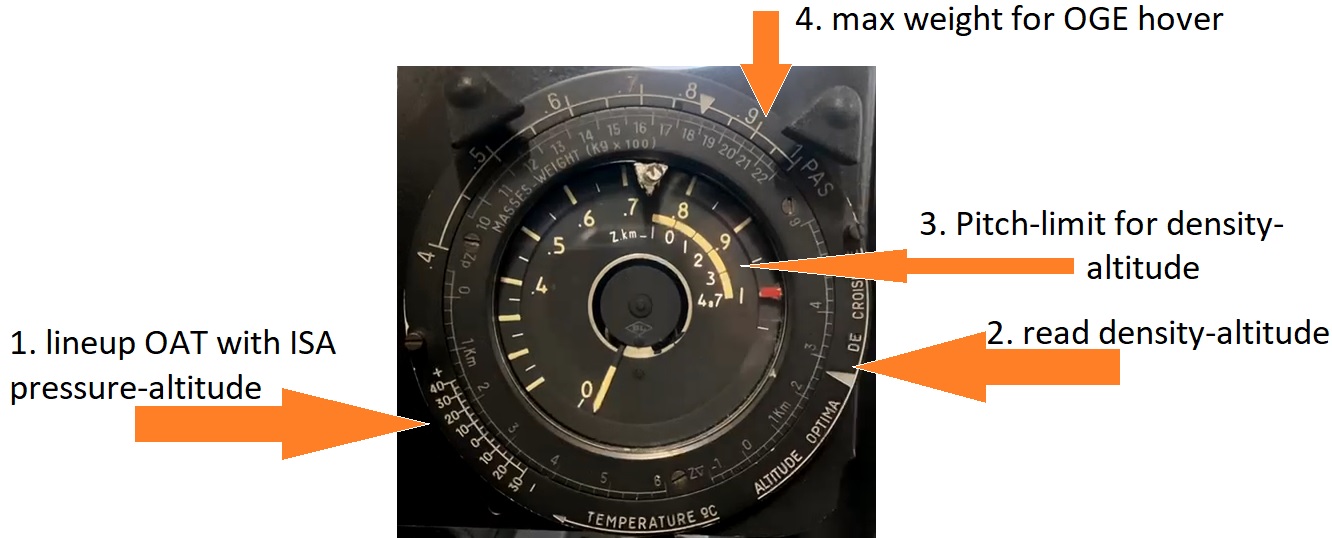
Wie im vorherigen Abschnitt geschildert, kann der Pilot einer Lama leider während des Fluges die Leistungsgrenzen der Lama nicht sehen. Er muss diese leider selber berechnen. Dazu gibt es einen Rechenschieber, der kreisförmig um den Collins-Pitch-Indicator gebaut wurde.
Der äußere Ring ist drehbar, die Nadel in der Mitte der Anzeige zeigt lediglich die Position des Pitch-Hebels an und alles andere ist unbeweglich. Einige Lamas haben zusätzlich noch einen kleinen weißen Knopf, der zur Erinnerung vom Piloten an die Position des errechneten Pitch-Maximums geschoben werden kann.

Wie funktioniert nun das ganze?
0. Zunächst muss über das Thermometer im Cockpit die aktuelle Außentemperatur abgelesen werden. Anschließend muss der Höhenmesser auf Standard-Luftruck (29.92) eingestellt werden und die angezeigte Höhe abgelesen werden.
- Nun wird der äußere Drehring so lange gedreht, bis die Außentemperatur exakt gegenüber der angezeigten Höhe steht. (In unserem Beispiel sind dies etwa 12°C auf 2250 Meter oder auch -20°C auf 3250 Meter Höhe)
- Auf der anderen Seite zeigt nun der längliche weiße Pfeil auf die aktuelle Dichtehöhe in der sich die Lama gerade befindet. (Dies ist in unserem Beispiel also die Dichtehöhe von ungefähr 2750 Meter Höhe). Dies zeigt eindrücklich, wie stark die Temperaturunterschiede die Dichtehöhe verändern! 12°C auf 2250 Metern entspricht also tatsächlich der gleichen Luftdichte wie auch -20°C auf 3250 Metern.
- Wir können nun in der Mitte der Anzeige sehen, dass wir somit ungefähr 93% Pitch ziehen dürfen. Die kleinen Zahlen ganz innen in der Anzeige entsprechen jeweils der Dichtehöhe und zeigen somit den maximal erlaubten Pitch-Wert.
- Als letztes können wir nun sehen, dass in diesem Beispiel die Lama tatsächlich noch mit ungefähr 2100kg Gewicht OGE Schweben können müsste. Dazu ließt man oben das Gewicht gegenüber dem Pitch-Wert außen auf dem Ring ab.
Wie ihr sicherlich erkennt, ist dies ein Vorgang, der in der Realität von kaum einem Piloten tatsächlich während des Fluges durchgeführt wird. Dazu bindet er viel zu lange die Aufmerksamkeit und die Anzeige ist auch viel zu klein im Panel! Meine Gespräche mit realen Lama-Piloten haben gezeigt, dass sich diese Piloten immer im Vorfeld des Fluges genau überlegen, wie viel Pitch beim Start, im Reiseflug (oder am höchsten Punkt) und am Landeflugplatz erlaubt ist. Dazwischen versucht man einfach linear zu interpolieren und nach Erfahrungswerten zu fliegen.
-
1
-
Titel: Die Lama und der Pitch-Indicator 1/2
In unserer heutigen modernen Welt geht es viel um Effizienz und Sparsamkeit. Moderne Hubschrauber sind oft bis zum Extrem optimiert und konstruiert. Dies führt dazu, dass hier oft viele verschiedene Parameter überwacht und eingehalten werden müssen, damit keine Bauteile versagen und der Hubschrauber Schaden nimmt. Daher wird in vielen Turbinenhubschraubern die Turbineninnentemperatur ITT, die Torque-Werte der Turbine, die Krafteinwirkung auf Getriebe oder Rotormast und vieles mehr ständig überwacht. Es gibt viele Instrumente und auch viele Fehler, die er Pilot machen kann. Es ist relativ einfach diese Hubschrauber durch Fehlbedienung zu zerstören. Dies ist in der Lama völlig anders. Um das zu verstehen müssen wir uns die Grundlagen der Lama anschauen:
Für die Indische Armee wurde der leichte Körper (Airframe) der Alouette II (Ersflug 1955) mit den dynamischen Komponenten und dem Triebwerk der Alouette III (Erstflug 1959) kombiniert. Es entstand die SA315b-Lama (Erstflug1969). Dieser Hubschrauber ist völlig übermotorisiert. Die Turbine Turbomeca Artouste IIIB liefert maximal 870 Wellen-PS an der Welle und wurde eigentlich für größere Maschinen konstruiert. Die mechanischen Komponenten der Lama sind aber nur für eine Dauerleistung von 550 PS und kurzfristigen 590 PS konstruiert! Somit nutzt die Lama bei Höchstbelastung dauerhaft lediglich 63 % der verfügbaren Power der Turbine! Das führt zu einem großen Unterschied der Lama im Vergleich zu anderen Turbinenhubschraubern. Es ist (fast) unmöglich mit der Lama in normalen Bedingungen die Temperaturgrenzen der Turbine zu erreichen. Man muss schon an den heißesten Orten dieser Erde sehr hoch und mit viel Last fliegen, um eventuell die maximal erlaubte Turbinentemperatur der Turbine zu erreichen. Auch kann die Mechanik der Turbine überhaupt nicht überlastet werden. Bevor die Turbine schaden nehmen würde, würde sie eher andere Komponenten wie das Hauptgetriebe oder kraftübertragende Wellen zerstören.
Also wurde in der Lama auf all diese Anzeigen verzichtet! Es gibt in der Lama keine Torque-Anzeige, keine ITT-Anzeige und auch keine andere Leistungsanzeige. Die Ingenieure von Sud-Aviation (später Aérospatiale) mussten aber irgendwie gewährleisten, dass der Pilot die Struktur und mechanischen Komponenten der Lama nicht überlastet! Der einfachste Weg, der ihnen einfiel ohne Messgeräte in der Lama zu verbauen war schlicht eine Begrenzung des maximal erlaubten Pitch-Wertes.
Daher wurde ganz simpel eine Anzeige erfunden die die Position des Pitch-Hebels im Cockpit anzeigt. Diese ist ganz simpel aufgebaut und misst über ein am Hebel befestigtes Poti schlicht die Bewegung dieses Hebels und zeigt diese auf dem Panel als Wert von 0.0 bis 1.0 an! Je dünner nun die Luft wird, um so weniger Auftrieb und Widerstand erzeugen die Rotorblätter. Also sinkt auch die Kraftbelastung der mechanischen Komponenten. Das führt zu einem Verhalten in der Lama, welches viele andere Hubschrauberpiloten zunächst verwirrt: je wärmer es ist und je höher wir fliegen, um so mehr Pitch dürfen wir ziehen! Da wir ja keine thermischen Grenzen befürchten müssen, dürfen wir mehr Pitch ziehen, wenn die Luft dünner wird.
Die Ingenieure bei Sud-Aviation haben also schlicht ausgerechnet, wie viel Pitch in Abhängigkeit zur Dichtehöhe gezogen werden darf.
In der Lama bedeutet dies folgende Pitch-Werte für bestimmte Dichtehöhen:
- -3300ft -> 75% Pitch
- 0ft -> 80% Pitch
- 3300ft 85% Pitch
- 6600ft 90% Pitch
- 9900ft 95% Pitch
- 13200ft (and above) 100% Pitch
Für die Ingenieure, die Herstellung und die Wartung der Lama ist dies eine sehr gute Lösung. Die Lama ist dadurch äußerst simpel aufgebaut. Für die Turbine gibt es im Cockpit lediglich vier Anzeigen: Drehzahl, Öldruck, Öltemperatur und die Temperatur des Abgasrohres. Als einziges sonstiges Instrument für die Flugleistung hat der Pilot die Position seines Pitch-Hebels im Panel.
Allerdings bedeutet diese Konstruktion etwas mehr Arbeit für den Piloten! Er muss nun ständig die exakte Dichtehöhe im Kopf haben. Beim Start am Boden kann er sich diese noch in Ruhe ausrechnen. Fliegt er aber weitere Strecken oder wechselt ständig die Flughöhe (etwa bei Materialtransporten in den Bergen) so muss er ständig bedenken, dass er weit oben mehr Pitch ziehen darf als unten und muss dies unter Umständen auch im Flug nochmals nachrechnen und neu bestimmen.
Dazu gibt es den sogenannten „Computer“ in der Lama. Dies ist tatsächlich nur ein simpler Rechenschieber und wird von mir dann in meinem nächsten Post erklärt
.
Philip
-
1
-
-
-
Schritt für Schritt geht es voran. (Schade, dass ich die älteren Beiträge nicht mehr editieren kann, sonst hätte ich einfach die Bilder ausgetauscht)
-
2
-
-
-
-
-
Vor 1 Stunde, Guenni99 sagte:
... sieht ja fast danach aus, als wenn das Gerät dieses Jahr noch für den normal sterblichen fliegbar wird
Tja... wir werden sehen. Ich kann das wirklich nicht abschätzen. Dies ist ja meine erste Veröffentlichung... das 3D-Modell scheint doch deutlich komplexer und schwieriger zu sein, als wir dachten. Anders als bei vielen anderen Flugzeugen/Hubschraubern ist halt bei der Lama so gut wie nichts verkleidet.
Das macht sie in meinen Augen zwar sehr attraktiv, ist aber in den Augen eines 3D-Entwicklers wohl ein absoluter Albtraum... schau dir allein diese Steuerstangen und Seile an, die hinten unten aus der Kabine kommen. Ab da sind die bis zum Rotorblatt (Haupt-und Heckrotor) nicht mehr verkleidet, sondern über Umlenkhebel oder -rollen immer im Freien zu sehen.

Dann trifft alles unter dem Rotorkopf zusammen... nicht zu vergessen die unverkleidete Turbine...

Die tatsächliche Fertigstellung des 3D-Modells und die Texturierung dieses 3D-Monsters ist also aktuell die komplexeste Baustelle und ich kann nicht abschätzen wie lange das wirklich braucht. Ansonsten könnte die Lama schon in die Beta-Phase gehen. Aber ohne 3D-Modell macht das noch nicht wirklich Freude...
-
1
-
-
Aktuell entwickle ich eine Partikel-Simulation: Mein Plugin liest die Untergrundbeschaffenheit aus und verändert dann live die Farbe und den Alpha-Kanal der Partikel-Texturen um diese mit fließenden Übergängen dem Boden entsprechend anzupassen.
Da diese Partikel sehr Hardware hungrig sind und (je nach GPU) einen spürbar negativen Einfluss auf die fps haben können, habe ich zusätzlich einen Schalter eingebaut, der diese komplett ein- und ausschalten kann. Dabei wird nicht nur die Sichtbarkeit abgeschaltet, sondern der "Emitter" also die Partikelquelle komplett deaktiviert. Wenn man also die Partikel abschaltet, werden diese nicht nur unsichtbar, sondern überhaupt nicht mehr generiert. Somit ist tatsächlich bei abgeschaltetem Effekt kein Einfluss mehr vorhanden und die Lama funktioniert auch auf schwächeren Systemen ohne Einbußen.
Aktuell habe ich es so voreingestellt, dass der Standard immer ausgeschaltete Partikel sind. Wer diese also sehen möchte, muss nach dem Laden der Lama selber aktiv werden und diesen Effekt einschalten.
-
1
-
-
Flugmodel und Sound update
Beachtet bitte, dass das visuelle Modell auf einem ersten sehr alten Blender-test-Export (nur die Kabine) basiert und noch nicht die Qualität der bisherigen Khamsin-Bilder erreicht. Der Hauptrotor und der Heckrotor sind von einem anderen Freeware-Helikopter kopiert, nur um euch meine funktionierende Rotoranimation zeigen zu können. Sie haben nichts mit unserer Lama zu tun und sind vorerst nur als Platzhalter gedacht...
Dies ist also nur ein kleines Update bezüglich der Custom Plugins und des hörbaren Sounds innerhalb von X-Plane.
-
Angenommen, wir wollen die Lama starten: Es sollte kein Blatt über dem heißen Turbinenauslass sein. Also bitten wir eine helfende Hand, die Blätter für uns zu drehen:
-
Nehmen wir weiter an, wir bemerken einen Fehler und brechen den Startvorgang ab:
-
jetzt machen wir einen besseren Start, schließen aber die Tür und setzen das Headset auf (weil es einfach viel zu laut wird....)
-
Heben wir ab (habt ihr das Rattern des Übergangsauftriebs gehört? Und habt ihr die Geschwindigkeitsanzeige in der turbulenten Luft gesehen?)
-
Lasst uns ein paar g-Kräfte ziehen:
-
Lass uns zurückkommen und wieder landen:
-
Einige Leute am Boden haben eine weitere Landung entdeckt (der Ton funktioniert zu 95 % im Replay):
-
Es gibt einige verschiedene Sound-Cones rund um den Heli. Lasst uns kurz herum gehen:
-
Jetzt schalten wir sie aus...
Wie bereits erwähnt: dies ist noch in Arbeit und alles ist noch "Work-in-Progress".
Bekannte Bugs bis jetzt::
-
Beim Betrachten eines Starts im Replay-Modus wird eine wichtiges Sound-Dataref zu spät aktualisiert. So hört sich die erste Sekunde des Hochfahrens der Turbine so an, als ob sie gerade trocken läuft (was auch simuliert ist und daher auch möglich ist)... nach einer Sekunde "schnappt" der Sound auf den richtigen Status und "springt" somit zu den echten Start-mit-Zündung-und-Kraftstoff-Sound. Eine Lösung dafür habe ich noch nicht gefunden... aber es betrifft auch nur die erste Sekunde des Starts...
- Einige Physikdatarefs (z.B. sim/flightmodel/engine/descent_speed_ratio), die für die Flattergeräusche verantwortlich sind, werden im Replay nicht aktualisiert. Es fehlen also einige Flattergeräusche in der Kabine, wenn ein Replay abgespielt wird. (Außengeräusche sind von diesem Problem nicht betroffen)
- Generell werden einige Daten bei der Wiedergabe nur einmal pro Sekunde oder 1/2 Sekunde aktualisiert. Daher können die Anzeigen und einige Geräusche (z.B. Drehzahl) etwas "holprig" reagieren, wenn sie sich während der Wiedergabe ändern. Aber immerhin: es funktioniert zu 95 %!
-
2
-
Angenommen, wir wollen die Lama starten: Es sollte kein Blatt über dem heißen Turbinenauslass sein. Also bitten wir eine helfende Hand, die Blätter für uns zu drehen:












Aérospatiale SA315b Lama in der Entwicklung
in Helikopter Allgemein
Posted
Ich bin vollbeschäftigt mit der Lama 2.0 für XP12 (und arbeite noch nebenher an weiteren anderen Projekten mit, bei denen ich aber nicht Federführend bin
… unter anderem ein H130 Heli und zwei historische Flugzeuge).
Ich kann also nicht garantieren, immer Zeit für Antworten zu haben, aber Fragen darfst du natürlich immer!
Philip